Selain robot beroda, jenis robot lain yang paling banyak dikembangkan adalah robot berkaki. Robot ini bergerak dengan menggunakan servo, jenis motor yang rotasinya dapat diatur, dan bahkan servo yang canggih sudah memiliki rangkaain pengontrol didalamnya.
Ada banyak sekali jenis robot berkaki. Berikut jenis-jenis robot berkaki yang dilihat dari seberapa banyak jumlah kakinya.
1. Robot Berkaki Satu. Sama seperti halnya robot beroda satu, robot berkaki satupun termasuk sulit mekaniknya. Walaupun begitu masih ada pihak yang berusaha membuatnya, contohnya ditunjukan digambar bawah ini.

2. Robot Berkaki Dua. Biasa dipanggil Biped, robot ini memiliki 2 kaki dan dapat berjalan layaknya seperti kaki manusia. Untuk pembelajaran ataupun aplikasi nyatanya, robot berkaki tidak perlu memiliki badan ataupun bagian lainnya, cukup kaki sajapun tidak masalah. Dibawah ini adalah contoh robotnya, dibuat menggunaka Kit Innovati, namanya Bipedinno.

3. Robot Berkaki Tiga. Panggilan robot ini Triped, karena memiliki 3 kaki gerak dan berjalan robot bisa lebih luas, kemanapun dia inginkan. Contoh robot Triped dibawah ini bernama Strider.
4. Robot Berkaki Empat. Sebut saja Quadpod. Contoh robotnya bernama BigDog, adalah robot berkaki empat buatan Boston Dinamic, perusahaan robot yang sekarang telah diakuisisi oleh Google. BigDog ini dirancang untuk keperlun militer, tepatnya untuk membawa amunisi saat perang.
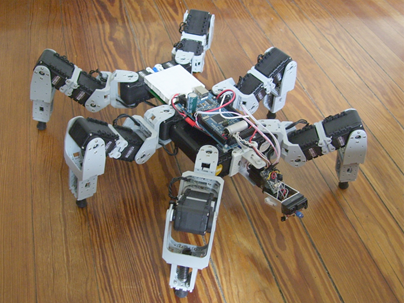
5. Robot Berkaki Enam. Sering dipanggil Hexapod. Kebanyakan gerakan kaki robot meniru dari serangga. Robot Hexapod cukup sulit dibuat, dan karena membutuhkan banyak Servo, juga menambah mahal pembuatannya. Tapi keunggulannya, banyak kombinasi yang bisa dibuat. Dan pergerakan kakinya bisa lebih cepat, serta banyak dikompetisikan juga.
6. Robot Berkaki Delapan. Nama kerennya Octapod. Gerakan kakinya meniru laba-laba, sehingga pergerakan robot ini bisa lebih lincah. Karena jumlah kakinya banyak, jumlah servo yang dipakaipun tidak perlu servo yang kuat. Penggunaan mini servo sudah cukup.
 Masih ada banyak sebenarnya bentuk robot berkaki yang pernah dibuat, tapi secara keseluruhan enam jenis robot diatas sudah mencukupi untuk pengetahuan kita. Thank's
Masih ada banyak sebenarnya bentuk robot berkaki yang pernah dibuat, tapi secara keseluruhan enam jenis robot diatas sudah mencukupi untuk pengetahuan kita. Thank's
Ada banyak sekali jenis robot berkaki. Berikut jenis-jenis robot berkaki yang dilihat dari seberapa banyak jumlah kakinya.
1. Robot Berkaki Satu. Sama seperti halnya robot beroda satu, robot berkaki satupun termasuk sulit mekaniknya. Walaupun begitu masih ada pihak yang berusaha membuatnya, contohnya ditunjukan digambar bawah ini.

2. Robot Berkaki Dua. Biasa dipanggil Biped, robot ini memiliki 2 kaki dan dapat berjalan layaknya seperti kaki manusia. Untuk pembelajaran ataupun aplikasi nyatanya, robot berkaki tidak perlu memiliki badan ataupun bagian lainnya, cukup kaki sajapun tidak masalah. Dibawah ini adalah contoh robotnya, dibuat menggunaka Kit Innovati, namanya Bipedinno.

3. Robot Berkaki Tiga. Panggilan robot ini Triped, karena memiliki 3 kaki gerak dan berjalan robot bisa lebih luas, kemanapun dia inginkan. Contoh robot Triped dibawah ini bernama Strider.
 |
| Romela |
4. Robot Berkaki Empat. Sebut saja Quadpod. Contoh robotnya bernama BigDog, adalah robot berkaki empat buatan Boston Dinamic, perusahaan robot yang sekarang telah diakuisisi oleh Google. BigDog ini dirancang untuk keperlun militer, tepatnya untuk membawa amunisi saat perang.
 |
| BigDog |
5. Robot Berkaki Enam. Sering dipanggil Hexapod. Kebanyakan gerakan kaki robot meniru dari serangga. Robot Hexapod cukup sulit dibuat, dan karena membutuhkan banyak Servo, juga menambah mahal pembuatannya. Tapi keunggulannya, banyak kombinasi yang bisa dibuat. Dan pergerakan kakinya bisa lebih cepat, serta banyak dikompetisikan juga.

6. Robot Berkaki Delapan. Nama kerennya Octapod. Gerakan kakinya meniru laba-laba, sehingga pergerakan robot ini bisa lebih lincah. Karena jumlah kakinya banyak, jumlah servo yang dipakaipun tidak perlu servo yang kuat. Penggunaan mini servo sudah cukup.

Komentar
Posting Komentar